

仓库:https://gitee.com/event-os/basic-os
在上一篇中,我们从架构视角出发,了解了 Basic OS 的设计理念和核心机制:共享任务栈、协作式调度、基于 PendSV 的上下文切换……这些特性让它成为资源受限设备中,极具性价比的结构化选项;
但了解原理只是第一步;
真正的价值,来自它在实际项目中的表现;这篇文章,我们将从定义任务开始,带你完整走一遍 Basic OS 的应用流程:如何写任务?如何初始化调度器?任务之间如何协作与切换?
不需要复杂的配置,也无需外部依赖;你将看到的是一个纯净、高效、清晰可控的任务调度过程,真正让你从“裸机大 while(1)”走向结构化设计的实战落地;
支持平台
当前 Basic OS 默认只适配了 Cortex-M0 和 M3 内核(比如 STM32F103 或 F030),虽然不算通用,但架构非常清晰,完全可以参考其结构来适配其他内核或平台;如果你对汇编和异常向量表比较熟悉,实现并不困难;
准备文件
使用 Basic OS 时,最基本的工作就是把它的核心源码添加到你的工程中(文件可以去开头所说的仓库中下载);至少需要以下几个文件:
| 文件名 | 说明 |
|---|---|
| basic_os.c | 系统核心逻辑实现 |
| basic_os.h | 系统核心头文件 |
| cpu.c | 与平台无关的通用 CPU 支持 |
| port_mdk.s | 与平台有关的汇编端口(不同平台需对应更换) |
此外,还需要你自己实现部分平台相关的钩子函数、SysTick中断等逻辑,官方示例中以 cb_basic_os.c 命名此文件;你也可以照此命名,并加入自己的实现:
1 |
|
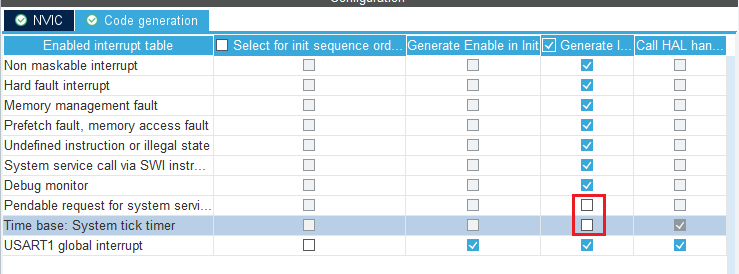
特别注意(针对 STM32 使用 CubeMX 的情况)
CubeMX 默认会自动生成 SysTick_Handler 和 PendSV_Handler,而这两个函数已由 Basic OS 实现;请务必在 NVIC 配置页面 → Code Generation 设置中取消勾选它们的生成,避免函数重定义冲突;
初始化 Basic OS
在你的 main.c 中,初始化 Basic OS 的代码结构非常简单:
1 |
|
初始化的关键点是提供一段连续 RAM 区域作为共享任务栈,这里用了 4096 字节,具体大小依据任务栈深度和应用复杂度可调整;
注意:栈区必须是静态分配(static/global),不能是局部变量或动态分配,否则可能在函数退出后被破坏,导致调度器异常崩溃;
定义任务:结构化的多任务运行方式
在 Basic OS 中,每个任务就是一个函数 + 一个注册宏;定义任务的方式非常直观,适合嵌入式初学者理解;
以下是一个典型的多任务定义示例:
1 |
|
bos_task_export参数:
- 第一个参数:任务名称(可用于调试)
- 第二个参数:函数指针(真正的任务执行体)
- 第三个参数:任务优先级(同优先级按注册顺序轮转)
- 第四个参数:任务参数(通常传 NULL)
bos_task_export() 本质上是通过宏将任务描述信息放入 .bos_tasks 特定段,系统初始化时会自动扫描这段数据进行任务注册;所以bos_task_export()并不需要被调用,只需要在代码中这样导出(注册)任务即可;
Basic OS 是协作式调度器,不支持抢占式调度;只有当当前任务主动 yield 或 delay 时,调度器才会切换到其他任务;优先级高的任务在有多个可运行任务时会优先执行,但不会打断正在运行的任务;
我们可以定义多个任务,观察它们是否能按预期并发执行、互不干扰:
1 | void _func_poll_2(void *parameter) { while (1) { count_poll2++; bos_task_yield(); } } |
你还可以添加一些控制硬件的任务,例如通过 GPIO 控制 LED 闪烁:
1 |
|
软件定时器
在某些实际场景中,仅靠 bos_delay_ms() 实现任务延时是远远不够的;比如,我们希望任务可以“预约”一段时间后执行一次,或中途暂停、恢复某个定时行为,这时就需要更强大的软件定时器机制;
Basic OS 内置了轻量级的软件定时器接口,能够提供灵活、可控的定时事件触发逻辑,避免我们手动维护繁琐的计数器状态;
这一部分的使用非常简单,核心只需要掌握以下 5 个函数:
- bos_timer_export(_name, _func, _oneshoot, _para):导出(注册)一个定时器
- _name:定时器名称
- _func:定时器回调函数
- _oneshoot:是否是一次性定时器,true 表示是一次性定时器,false 表示是周期性定时器
- _para:定时器回调函数的参数
相当于给调度器声明“我有这么一个定时器”,必须在使用前调用一次,推荐在 main() 的初始化部分完成;
示例用法:
1 | void _func_poll_7(void *para); |
int16_t bos_timer_get_id(const char *name):从软件定时器名称获取 ID,返回定时器 ID 或者错误代码
void bos_timer_start(uint16_t timer_id, uint32_t period):启动一个定时器,period 单位是毫秒,可以和get_id配合使用
void bos_timer_stop(uint16_t timer_id):停止一个定时器,可以和get_id配合使用
void bos_timer_reset(uint16_t timer_id, uint32_t period):重置一个定时器,可以和get_id配合使用
总结
Basic OS 虽然定位轻量,但其设计并不简陋;从任务注册、共享栈调度,到钩子机制与软件定时器,它具备了一个结构化操作系统的核心要素;本文从创建工程出发,完整梳理了 Basic OS 的使用流程,让我们真正从裸机的 while(1) 循环中走出,迈入结构化的多任务世界;
当然,Basic OS 并非万能,它不支持抢占式调度,也没有复杂的同步机制,但也正是这种“克制”,让它在资源受限的嵌入式设备中成为一种高性价比的选择;
如果你正在开发一个不复杂但希望清晰可维护的项目,Basic OS 值得一试;下一步,我们可以探索它与外设协同、低功耗运行、任务通信等更高级的实战应用;